
Assignment 2
CS4186 Computer Vision and Image Processing
cs assignment代写 Given stereo image pairs (three stereo pairs are provided in https://drive.google.com/drive/folders/1pdDkFpa59m4A02pLkUqI1H2Zb_GerLkK?usp=sharing )…
Given stereo image pairs (three stereo pairs are provided in https://drive.google.com/drive/folders/1pdDkFpa59m4A02pLkUqI1H2Zb_GerLkK?usp=sharing ), you are required to write a program with C++ or Python or Matlab to compute the the Disparity Maps of each left (view1) image. cs assignment代写
For each stereo pair, the two images (named view1.png and view5.png) are already rectified so that all image motion is purely horizontal. Ground-truth disparity maps of the left view (view1) are also provided for reference. It should be noted that disparities are represented “as is”, i.e., intensity 60 means the disparity is 60. The exception is intensity 0, which means unknown disparity. More details about the stereo pairs can be found in https://vision.middlebury.edu/stereo/data/scenes2005/.
The reconstructed results will be evaluated by Peak_Signal-to-Noise_Ratio (PSNR): https://en.wikipedia.org/wiki/Peak_signal-to-noise_ratio . You can use the source code implemented by Matlab (https://www.mathworks.com/help/vision/ref/psnr.html) or Python ( https://cvnote.ddlee.cc/2019/09/12/psnr-ssim-python ) for PSNR calculation. The PSNR is calculated against the ground-truth disparity map. The higher PSNR you can achieve, the better performance you will get.
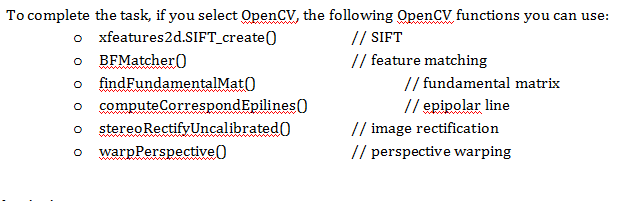
Hints: cs assignment代写
Submission
Please zip the followings and submit to Canvas:
- Computer program: Python/Matlab/C++ recommended. If you want to use another program language, please send an email to our Teaching Assistant.
- Submission Files: The following files should be provided: a. three disparity maps estimated by your program,as well as the PSNR results of the reconstructed disparity maps (20%); b. source code (40%); c. report (40%).
- Report: Report should be brief and no more than 6 pages. The report should briefly describe and analyze your methods.
Deadline cs assignment代写
The submission should be done before 10-May, 11:59pm.
Penalty on late submission: 20% of marks will be deducted per day. No submission will be allowed after five days from the deadline. Do NOT copy code from the internet and do not borrow other people’s code. Remember that PLAGIARISM is a serious offense for which you may fail the class or even be expelled from the university.
CS4186 asg 2
In assignment2, to fairly evaluate the estimated disparity maps, we have provided the official codes (both Matlab and Python) for the PSNR calculation. cs assignment代写
It is worth noting that: 1) the pixels in the ground-truth disparity map (disp1.png) with ‘0’ values are neglected in PSNR calculation. 2) We discard the pixels in the left part region (1-250 columns) of the left image (view1.png), as the corresponding pixels do not exist in the right image (view5.png).


